
I just got myself an early Christmas present – a SenseHAT for the RaspberryPi. This is the same gizmo Tim Peake will be using on the ISS to run AstroPi experiments designed by school children, so I have the added excitement of having some SPACE HARDWARE on my Pi.
It has a super-bright 8×8 RGB LED matrix, a joystick and various sensors: temperature (limited use as it’s on the board), plus more usefully, sensors for air pressure, humidity, a compass and a gyroscope. It’s really easy to program in Python with the libraries provided by the Raspberry Pi Foundation, and I had text scrolling across the screen within a couple of minutes of plugging it in for the first time.
The gyroscope caught my imagination when I set it up, and my first real project was a simple spirit level. It lights up red when it’s not level, green when horizontal, blue when vertical – and when you put it flat you get a white display with a ‘bubble’ in the middle. It would a great extension to code a ‘bubble’ that moves round the screen as you tilt it.
It’s also powered off a USB battery stick so you can use it in places where the mains don’t reach.
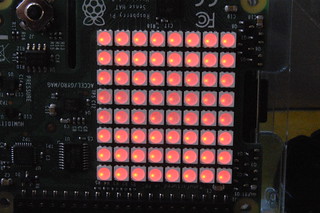
Not level – red display
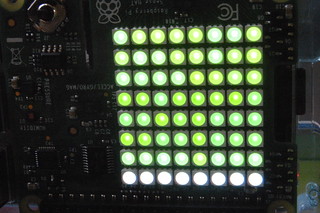
Horizontally level

Vertically level

Flat on a level surface
Here’s how it works (though the video doesn’t do justice to the lovely display due to its brightness and strobing:
And here’s the Python code, most of which is taken up with the simple images. (NB It probably needs a tweak! Thanks to David Honess for pointing out problems with .value() returning things in unexpected orders!)
from sense_hat import SenseHat
sense = SenseHat()
r = [255, 0, 0]
g = [0, 255, 0]
b = [0, 0, 255]
w = [255,255,255]
z = [0, 0, 0]
redimage = [
r,r,r,r,r,r,r,r,
r,r,r,r,r,r,r,r,
r,r,r,r,r,r,r,r,
r,r,r,r,r,r,r,r,
r,r,r,r,r,r,r,r,
r,r,r,r,r,r,r,r,
r,r,r,r,r,r,r,r,
r,r,r,r,r,r,r,r,
]
greenimage = [
w,w,w,w,w,w,w,w,
g,g,g,g,g,g,g,g,
g,g,g,g,g,g,g,g,
g,g,g,g,g,g,g,g,
g,g,g,g,g,g,g,g,
g,g,g,g,g,g,g,g,
g,g,g,g,g,g,g,g,
g,g,g,g,g,g,g,g,
]
blueimage = [
w,w,w,w,w,w,w,w,
b,b,b,b,b,b,b,b,
b,b,b,b,b,b,b,b,
b,b,b,b,b,b,b,b,
b,b,b,b,b,b,b,b,
b,b,b,b,b,b,b,b,
b,b,b,b,b,b,b,b,
b,b,b,b,b,b,b,b,
]
whiteimage = [
w,w,w,w,w,w,w,w,
w,w,w,w,w,w,w,w,
w,w,w,w,w,w,w,w,
w,w,w,z,z,w,w,w,
w,w,w,z,z,w,w,w,
w,w,w,w,w,w,w,w,
w,w,w,w,w,w,w,w,
w,w,w,w,w,w,w,w,
]
sense.set_pixels(redimage)
while True:
pitch, roll, yaw = sense.get_orientation().values()
# print (pitch, roll, yaw)
if (pitch < 3 or pitch > 355) and (yaw < 3 or yaw > 355):
sense.set_pixels(whiteimage)
elif pitch < 0.5 or pitch > 359.5:
sense.set_pixels(greenimage)
elif yaw < 5 or yaw > 355:
sense.set_pixels(blueimage)
else:
sense.set_pixels(redimage)